| Electrical Engineering is a free introductory textbook to the basics of electrical engineering. See the editorial for more information.... |
|
Home  The Polyphase Induction Motor Wound-Rotor (Slip-Ring) Motors The Polyphase Induction Motor Wound-Rotor (Slip-Ring) Motors |
|||||||






|
  |
||||||
|
Wound-Rotor (Slip-Ring) MotorsAuthor: E.E. Kimberly For varying-speed duty it is necessary that the resistance of the rotor winding be under control of the operator. For this purpose the rotor is provided with a polyphase winding that is similar to the stator winding and is connected to an external polyphase rheostat through collector, or slip, rings and brushes. A slip-ring motor is illustrated in Fig. 18-10, and its wound rotor is shown in Fig. 18-11. By proper control of the rotor rheostat, the operator is able to maintain maximum torque at all speeds in the starting period if desired. Rotor rheostats are usually designed to permit speed control also between 50 and 100 per cent of full-load speed. Such a method of speed control results in reduced efficiency, however, because of the ITRT losses in the rheostat.
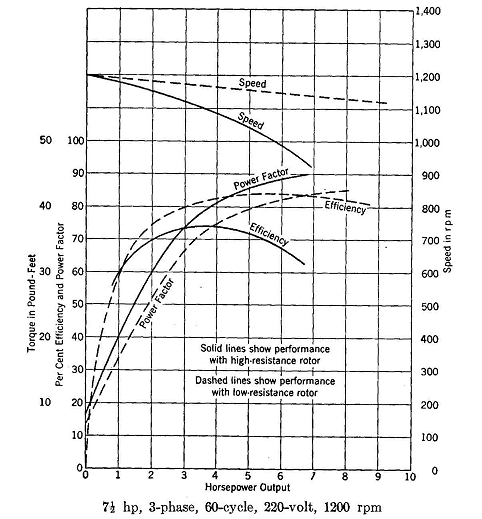
Slip-ring motors are well adapted to printing machinery, reciprocating pumps, ammonia compressors, and other applications requiring speed control or large sustained starting torque. Such motors may be started by direct connection to the power line through a line-starter (described on page 228). The following points of economic importance should be noted. 1. With the high-resistance rotor in Fig. 18-12: (a) The motor efficiency is lower because of higher rotor PR loss. (b) The motor will not attain a maximum power output so great as that with a normal-torque rotor, mainly because of the greater speed regulation.
(c) The power factor is higher than with a normal-torque motor because of higher rotor loss. (d) The maximum efficiency occurs with a much lower output than with a normal-torque rotor because rotor PR losses are greater. 2. With either rotor in Fig. 18-12: (a) The efficiency is poor at loads less than 25 per cent of rated full load, and neither motor should be applied to a load requiring much less than its rated output. (b) The power factor is very low at all loads less than about half of rated full load. See Chapter 25 on power-factor correction.
|
|||||||
| Home The Polyphase Induction Motor Wound-Rotor (Slip-Ring) Motors |
|
||||||