| Electrical Engineering is a free introductory textbook to the basics of electrical engineering. See the editorial for more information.... |
|
Home  The Single-Phase Motor The Split-Phase Induction Motor The Single-Phase Motor The Split-Phase Induction Motor |
|||||||






|
  |
||||||
|
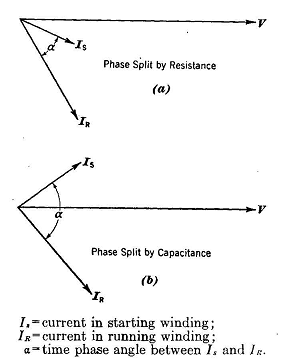
The Split-Phase Induction MotorAuthor: E.E. Kimberly As the name implies, the splitphase motor splits the line current into two parts at start. One part flows in the running winding at a great angle of lag behind the line voltage, because the winding is of low resistance and has high reactance as it is deeply embedded in the slots and is closely surrounded by iron. See Fig. 21-5 (a). The other part of the line current flows in the starting winding at a much smaller angle of lag behind the line voltage, as this winding is of relatively high resistance because smaller wire is used and is of low reactance because it is in the tops of the slots.
The phase is said to be split by resistance. The starting and running windings are located 90 electrical degrees apart in the stator frame, and the fluxes produced by the currents IS and IR are approximately 30 degrees displaced in time. The resulting field is a closer approach to the perfect rotating field than is that of the shaded-pole motor. Details of construction of a split-phase induction motor are shown in Fig. 21-6. The starting torque of the split-phase motor is usually about 2 1/2 times the full-load running torque. However, the starting current may be 7 to 9 times as great as the rated full-load current, and for that reason this type of motor is almost never built in sizes greater than 1/2 hp. Because of voltage disturbance caused by the high inrush of starting current, most power-generating companies prohibit the use of split-phase motors greater than 1/4 hp on domestic service lines. The starting winding is almost always designed for intermittent duty only, and is disconnected from the line by a centrifugal switch when the motor approaches synchronous speed. Failure of the switch to open the circuit because of a defect or because of mounting the motor vertically when it is designed for horizontal operation will cause the starting winding to be overheated.
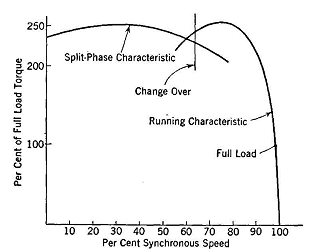
Split-phase motors may be reversed by reversing the connections of either the starting winding or the running winding. A typical speed-torque curve is shown in Fig. 21-7. This type of motor is used for driving washing machines, mangles, and other small devices which require only a moderate starting torque.
|
|||||||
| Home The Single-Phase Motor The Split-Phase Induction Motor |
|
||||||