| Lectures on Physics has been derived from Benjamin Crowell's Light and Matter series of free introductory textbooks on physics. See the editorial for more information.... |
|
Home  Vibration and Waves Resonance Putting Energy Into Vibrations Vibration and Waves Resonance Putting Energy Into Vibrations |
|||||||||||||||||||||||||||||||






|
  |
||||||||||||||||||||||||||||||
|
Putting Energy Into VibrationsWhen pushing a child on a swing, you cannot just apply a constant force. A constant force will move the swing out to a certain angle, but will not allow the swing to start swinging. Nor can you give short pushes at randomly chosen times. That type of random pushing would increase the child's kinetic energy whenever you happened to be pushing in the same direction as her motion, but it would reduce her energy when your pushing happened to be in the opposite direction compared to her motion. To make her build up her energy, you need to make your pushes rhythmic, pushing at the same point in each cycle. In other words, your force needs to form a repeating pattern with the same frequency as the normal frequency of vibration of the swing. Graph (a) shows what the child's x-t graph would look like as you gradually put more and more energy into her vibrations. A graph of your force versus time would probably look something like graph (b). It turns out, however, that it is much simpler mathematically to consider a vibration with energy being pumped into it by a driving force that is itself a sine-wave, (c). A good example of this is your eardrum being driven by the force of a sound wave.
Now we know realistically that the child on the swing will not keep increasing her energy forever, nor does your eardrum end up exploding because a continuing sound wave keeps pumping more and more energy into it. In any realistic system, there is energy going out as well as in. As the vibrations increase in amplitude, there is an increase in the amount of energy taken away by damping with each cycle. This occurs for two reasons. Work equals force times distance (or, more accurately, the area under the force-distance curve). As the amplitude of the vibrations increases, the damping force is being applied over a longer distance. Furthermore, the damping force usually increases with velocity (we usually assume for simplicity that it is proportional to velocity), and this also serves to increase the rate at which damping forces remove energy as the amplitude increases. Eventually (and small children and our eardrums are thankful for this!), the amplitude approaches a maximum value (d) at which energy is removed by the damping force just as quickly as it is being put in by the driving force.
This process of approaching a maximum amplitude happens extremely quickly in many cases, e.g. the ear or a radio receiver, and we don't even notice that it took a millisecond or a microsecond for the vibrations to "build up steam." We are therefore mainly interested in predicting the behavior of the system once it has had enough time to reach essentially its maximum amplitude. This is known as the steady-state behavior of a vibrating system. Now comes the interesting part: what happens if the frequency of the driving force is mismatched to the frequency at which the system would naturally vibrate on its own? We all know that a radio station doesn't have to be tuned in exactly, although there is only a small range over which a given station can be received. The designers of the radio had to make the range fairly small to make it possible eliminate unwanted stations that happened to be nearby in frequency, but it couldn't be too small or you wouldn't be able to adjust the knob accurately enough. (Even a digital radio can be tuned to 88.0 MHz and still bring in a station at 88.1 MHz.) The ear also has some natural frequency of vibration, but in this case the range of frequencies to which it can respond is quite broad. Evolution has made the ear's frequency response as broad as possible because it was to our ancestors' advantage to be able to hear everything from a low roars to a high-pitched shriek. The remainder of this section develops four important facts about the response of a system to a driving force whose frequency is not necessarily the same is the system's natural frequency of vibration. The style is approximate and intuitive, but proofs are given in the subsequent optional section. First, although we know the ear has a frequency - about 4000 Hz - at which it would vibrate naturally, it does not vibrate at 4000 Hz in response to a low-pitched 200 Hz tone. It always responds at the frequency at which it is driven. Otherwise all pitches would sound like 4000 Hz to us. This is a general fact about driven vibrations: (1) The steady-state response to a sinusoidal driving force occurs at the frequency of the force, not at the system's own natural frequency of vibration. Now let's think about the amplitude of the steady-state response. Imagine that a child on a swing has a natural frequency of vibration of 1 Hz, but we are going to try to make her swing back and forth at 3 Hz. We intuitively realize that quite a large force would be needed to achieve an amplitude of even 30 cm, i.e. the amplitude is less in proportion to the force. When we push at the natural frequency of 1 Hz, we are essentially just pumping energy back into the system to compensate for the loss of energy due to the damping (friction) force. At 3 Hz, however, we are not just counteracting friction. We are also providing an extra force to make the child's momentum reverse itself more rapidly than it would if gravity and the tension in the chain were the only forces acting. It is as if we are artificially increasing the k of the swing, but this is wasted effort because we spend just as much time decelerating the child (taking energy out of the system) as accelerating her (putting energy in). Now imagine the case in which we drive the child at a very low frequency, say 0.02 Hz or about one vibration per minute. We are essentially just holding the child in position while very slowly walking back and forth. Again we intuitively recognize that the amplitude will be very small in proportion to our driving force. Imagine how hard it would be to hold the child at our own head-level when she is at the end of her swing! As in the too-fast 3 Hz case, we are spending most of our effort in artificially changing the k of the swing, but now rather than reinforcing the gravity and tension forces we are working against them, effectively reducing k. Only a very small part of our force goes into counteracting friction, and the rest is used in repetitively putting potential energy in on the upswing and taking it back out on the downswing, without any long-term gain. We can now generalize to make the following statement, which is true for all driven vibrations: (2) A vibrating system resonates at its own natural frequency. That is, the amplitude of the steady-state response is greatest in proportion to the amount of driving force when the driving force matches the natural frequency of vibration.
As long as we're on the subject of collapsing bridges, it is worth bringing up the reports of bridges falling down when soldiers marching over them happened to step in rhythm with the bridge's natural frequency of oscillation. This is supposed to have happened in 1831 in Manchester, England, and again in 1849 in Anjou, France. Many modern engineers and scientists, however, are suspicious of the analysis of these reports. It is possible that the collapses had more to do with poor construction and overloading than with resonance. The Nimitz Freeway and Tacoma Narrows Bridge are far better documented, and occurred in an era when engineers' abilities to analyze the vibrations of a complex structure were much more advanced.
(3) When a system is driven at resonance, the steady-state vibrations have an amplitude that is proportional to Q. This is fairly intuitive. The steady-state behavior is an equilibrium between energy input from the driving force and energy loss due to damping. A low-Q oscillator, i.e. one with strong damping, dumps its energy faster, resulting in lower-amplitude steady-state motion.
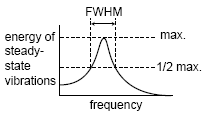
Our fourth and final fact about resonance is perhaps the most surprising. It gives us a way to determine numerically how wide a range of driving frequencies will produce a strong response. As shown in the graph, resonances do not suddenly fall off to zero outside a certain frequency range. It is usual to describe the width of a resonance by its full width at halfmaximum (FWHM) as illustrated on the graph.
(4) The FWHM of a resonance is related to its Q and its resonant frequency fres by the equation
(This equation is only a good approximation when Q is large.) Why? It is not immediately obvious that there should be any logical relationship between Q and the FWHM. Here's the idea. As we have seen already, the reason why the response of an oscillator is smaller away from resonance is that much of the driving force is being used to make the system act as if it had a different k. Roughly speaking, the half-maximum points on the graph correspond to the places where the amount of the driving force being wasted in this way is the same as the amount of driving force being used productively to replace the energy being dumped out by the damping force. If the damping force is strong, then a large amount of force is needed to counteract it, and we can waste quite a bit of driving force on changing k before it becomes comparable to the to it. If, on the other hand, the damping force is weak, then even a small amount of force being wasted on changing k will become significant in proportion, and we cannot get very far from the resonant frequency before the two are comparable.
Discussion Questions
|
|||||||||||||||||||||||||||||||
| Home Vibration and Waves Resonance Putting Energy Into Vibrations |
|
||||||||||||||||||||||||||||||