| Das eBook Angewandte Mikroelektronik wurde von Hans Lohninger zur Unterstützung verschiedener Lehrveranstaltungen geschrieben. Weitere Informationen finden sie hier. |

|
Home  Spezielle Schaltungen Regler Analoge Regelverstärker PID-Regler Spezielle Schaltungen Regler Analoge Regelverstärker PID-Regler |
|||||
| Siehe auch: Grundtypen von Regelverstärkern, P-Regler, PI-Regler | |||||






|
  |
||||
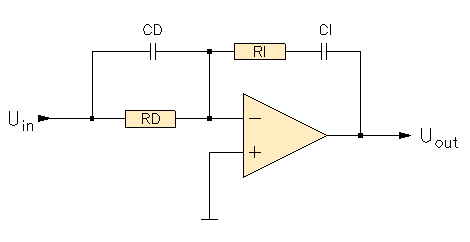
PID-Regler
Im PID-Regler sind alle drei grundlegenden Reglertypen kombiniert:
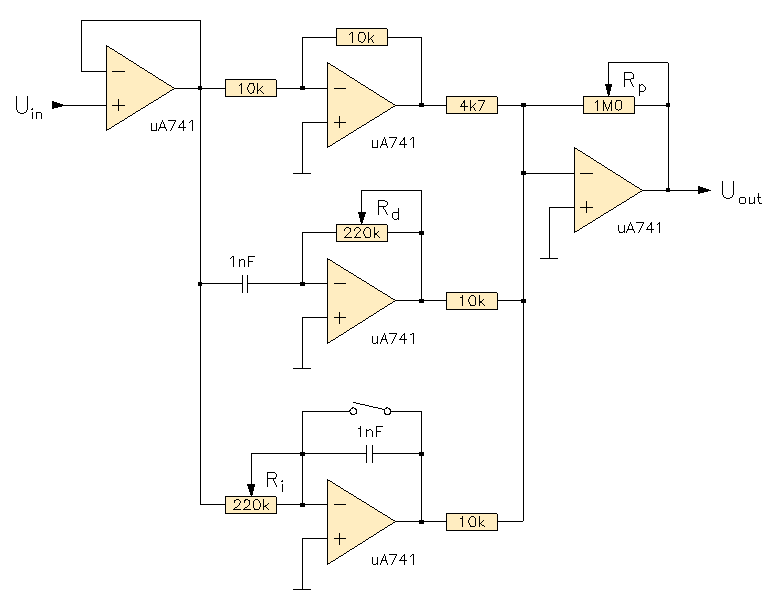
Die Dimensionierung eines solchen Reglers ist meist schwierig, da das Zeitverhalten der Regelstrecke (besonders bei langsamen Vorgängen) meist nur ungenau bekannt ist. Abhilfe schafft hier ein einstellbarer PID-Regler, dessen Parameter getrennt nach P-, I- und D-Anteil eingestellt werden können. Nach der erfolgreichen Einstellung können die ermittelten Werte auf die einfache PID-Reglerschaltung aus der oberen Abbildung übertragen werden. Folgende Abbildung zeigt einen einstellbaren PID-Regler der für einen Frequenzbereich von etwa 10 kHz ausgelegt ist.
Der Abgleich des Reglers geht so vor sich: Zuerst wird der Schalter am integrierenden Regler geschlossen und das Potentiometer Rd auf null gedreht. Damit liefern der I- und der D-Anteil keinen Beitrag zum Regelverhalten, der Regler verhält sich wie ein reiner P-Regler. Nun wird ein Rechtecksignal an den Eingang des Reglers gelegt und die Verstärkung des P-Reglers so weit erhöht, bis der Ausgang des Reglers einen Einschwingvorgang zeigt, der nur mehr schwach gedämpft ist. Im nächsten Schritt wird nun die Frequenz des D-Reglers durch Verdrehen des Potentiometers Rd so weit erniedrigt, dass der Einschwingvorgang nicht mehr sichtbar ist. Im dritten Schritt wird das Einschwingverhalten der Regelabweichung durch Einstellen des I-Reglers optimiert. Dazu wird der Schalter geöffnet und am Oszilloskop die Differenz zwischen Eingangs- und Ausgangssignal dargestellt. Das Potentiometer Ri wird nun so eingestellt, dass die Regelabweichung in der kürzestmöglichen Zeit auf null geht.
|
|||||
| Home Spezielle Schaltungen Regler Analoge Regelverstärker PID-Regler |
|
||||
Last Update: 2008-05-31